
产品体系
- 智能装备

- 数字矿山
- 智能选矿
- 其他产品

工程服务
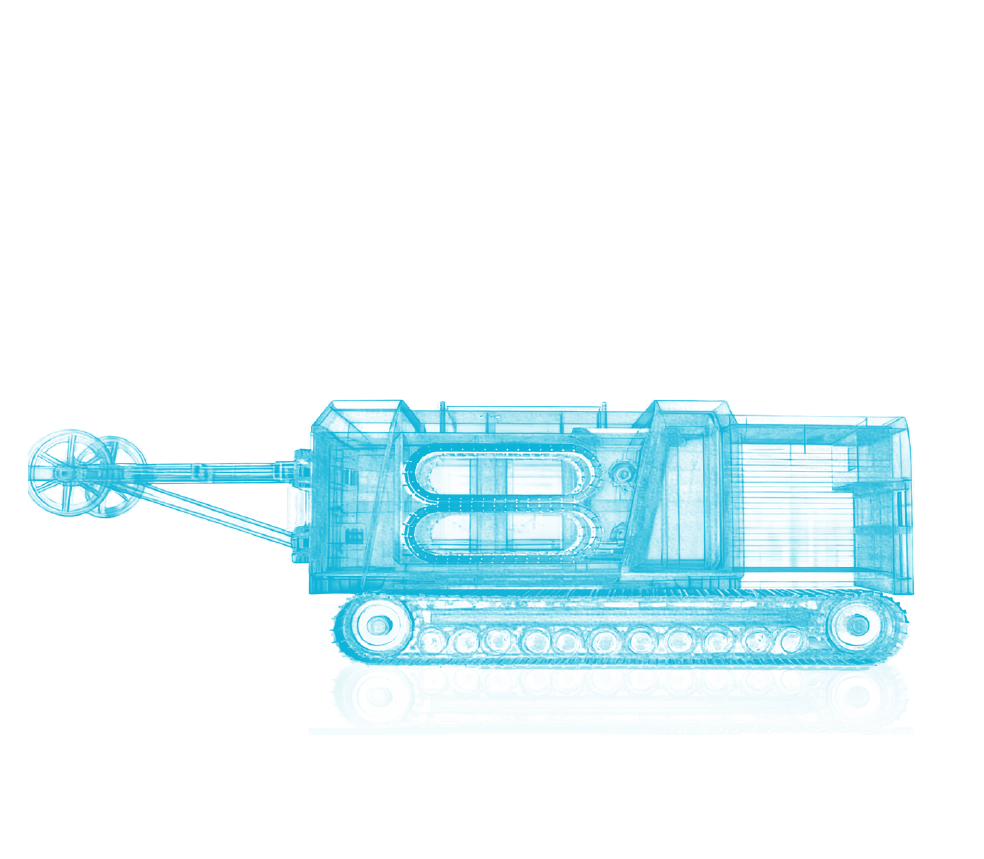
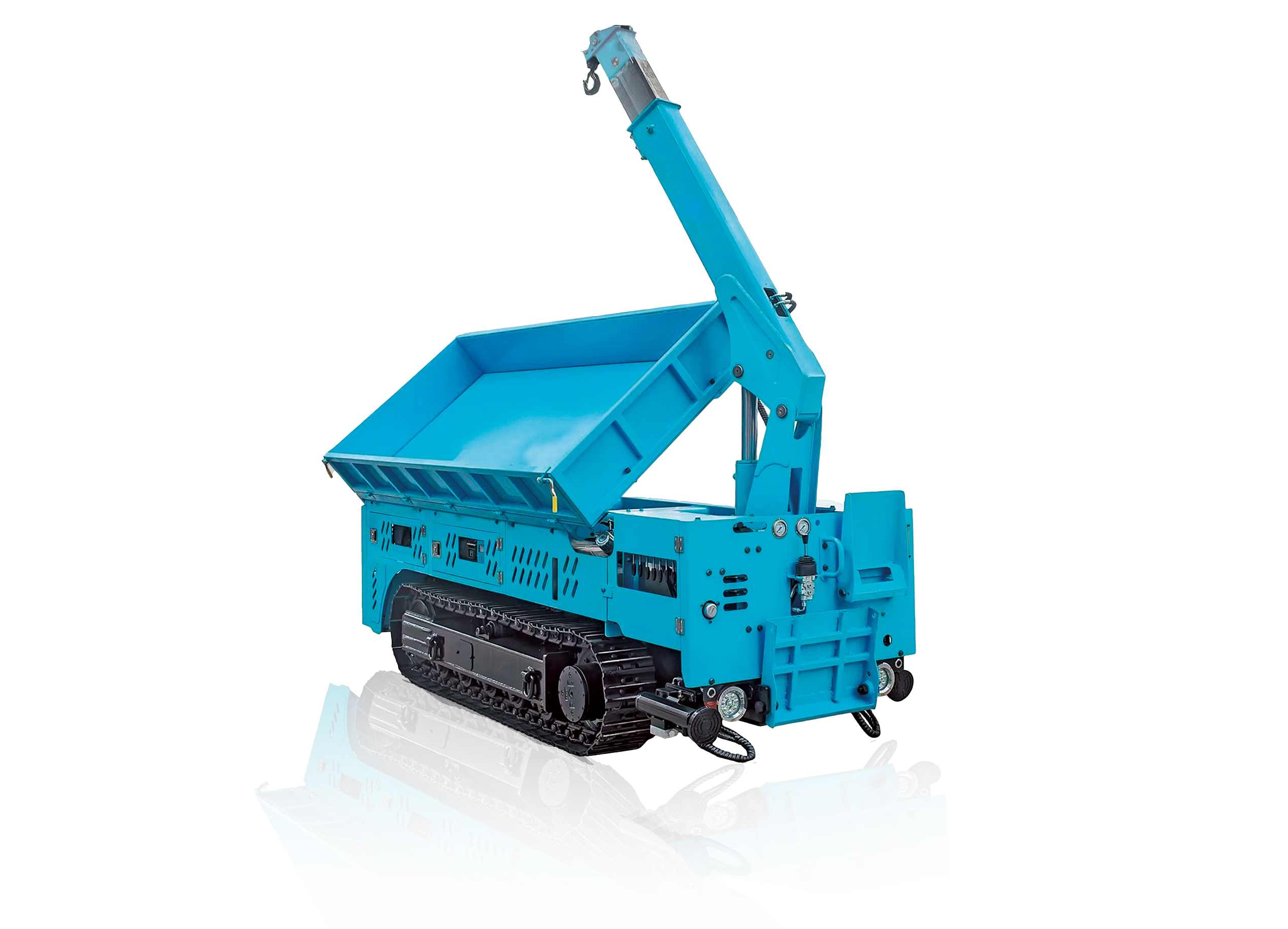
矿用气动履带平板运输机器人是一款以井下压风为动力、集吊装、遥控、侧卸于一体的多功能运输装备。通过履带行走与模块化功能设计,实现物料运输、安装辅助、卸载作业全流程机械化,具有体积小、灵活性强、环境适应力高等特点,可显著降低劳动强度,提升井下运输效率与作业安全。
项 目 | 单位 | MPCQL-3DY | MPCQL-5DY | MPCQL-6DY | MPCQL-7DY | MPCQL-8DY | MPCQL-9DY | MPCQL-ODY | MPCQL-1DY | MPCQL-2DY | ||
整机 | 额定载重量 | t | 3 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |
外形尺寸(长×宽×高) | mm | 3500×1100×2100(±50) | ||||||||||
整备质量 | kg | 2600 | ||||||||||
接地比压 | MPa | 0.05 | ||||||||||
满载接地比压 | MPa | 0.20 | ||||||||||
最小转弯半径 | mm | 2000 | ||||||||||
声压级 | dB(A) | 95 | ||||||||||
声功率级 | dB(A) | 112 | ||||||||||
最大牵引力 | kN | 25 | ||||||||||
平板高度 | mm | 700±20 | ||||||||||
离地间隙 | mm | 230 | ||||||||||
稳车最大工作宽度 | mm | 1780 | ||||||||||
遥控距离 | m | ≥40 | ||||||||||
吊装 机构 | 工作压力 | MPa | 12 | |||||||||
工作流量 | L/min | 12 | ||||||||||
额定起吊重量 | kg | 2000 | ||||||||||
臂身回转角度 | (°) | ±90 | ||||||||||
最大起吊高度 | mm | 2360 | ||||||||||
伸缩行程 | mm | 680 | ||||||||||
起吊速度 | mm/s | 100 | ||||||||||
行走 机构 | 行走方式 | 一 | 液压马达驱动、履带行走 | |||||||||
制动型式 | 一 | 失效安全型 | ||||||||||
行走速度 | m/min | 30 | ||||||||||
爬坡能力 | (°) | ±20 | ||||||||||
履带板宽度 | mm | 230 | ||||||||||
工作压力 | MPa | 12 | ||||||||||
工作流量 | L/min | 10 | ||||||||||
液压 泵站 | 额定工作压力 | MPa | 13 | |||||||||
额定工作流量 | L/min | 45 | ||||||||||
油箱有效容积 | L | 75 | ||||||||||
气动 马达 | 额定压力 | MPa | 0.5 | |||||||||
耗气量 | m³/min | 12 | ||||||||||



